|
Robot hand learns real world moves in
virtual training
 Send a link to a friend
Send a link to a friend
 [July 31, 2018]
By Stephen Nellis [July 31, 2018]
By Stephen Nellis
(Reuters) - Researchers backed by Tesla Inc
<TSLA.O> founder Elon Musk and Silicon Valley financier Sam Altman have
found a novel way to use software to teach a human-like robotic hand new
tasks, a discovery that could eventually make it more economical to
train robots to do things that are easy for humans.
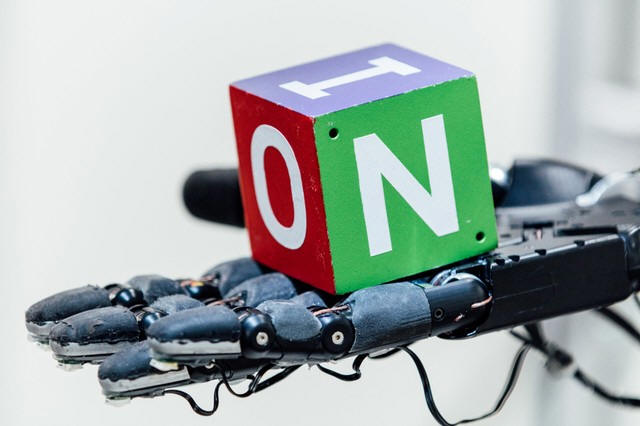
Researchers at OpenAI, a nonprofit artificial intelligence research
group founded in 2015, said on Monday they had taught a robotic hand to
rotate a lettered, multi-colored block until a desired side of the block
faces upward.
The task is simple. But the advance was in how the hand gained the
skill: All the learning happened in a software simulation and was then
transferred to the physical world with relative ease.
That solves a challenge for robotic hands, which look like the fist of a
robot from the 1980s "Terminator" science fiction film. The hands have
been commercially available for years but are difficult for engineers to
program. Engineers can write specific computer code for each new task,
which requires a pricey new program each time. Or robots can be equipped
with software that lets them "learn" through physical training.
Physical training takes months or years and has problems of its own -
for example, if a robot hand drops a workpiece, a human needs to pick it
up and put it back. That is expensive as well. Researchers have sought
to chop up those years of physical training and distribute them to
multiple computers for a software simulation that can do the training in
hours or days, without human help.
Ken Goldberg, a University of California Berkeley robotics professor who
was not involved in the OpenAI research but reviewed it, called the
OpenAI work released Monday "an important result" in getting closer to
that goal.
[to top of second column]
|
Dactyl, a system for manipulating objects, uses a ShadowRobot
Dexterous hand made in the UK to hold a 3D-printed and spraypainted
block, as seen in this photo provided July 30, 2018. OpenAI/Handout
via REUTERS

"That's the beauty of having lots of computers crunching on this,"
Goldberg said. "You don't need any robots. You just have lots of
simulation."
A key advance in the OpenAI research was transferring the robot
hand's software learning to the real world, overcoming what OpenAI
researchers call the "reality gap" between the simulation and
physical tasks. Researchers injected random noise into the software
simulation, making the robot hand's virtual world messy enough that
it was not befuddled by the unexpected in the real world.
"Now we're looking for more complicated tasks to conquer," said
Lilian Weng, a member of the technical staff at OpenAI who worked on
the research.
(Reporting by Stephen Nellis; Editing by Frances Kerry)
[© 2018 Thomson Reuters. All rights
reserved.]
Copyright 2018 Reuters. All rights reserved. This material may not be published,
broadcast, rewritten or redistributed.
Thompson Reuters is solely responsible for this content.
 |